See it in action
Gallery
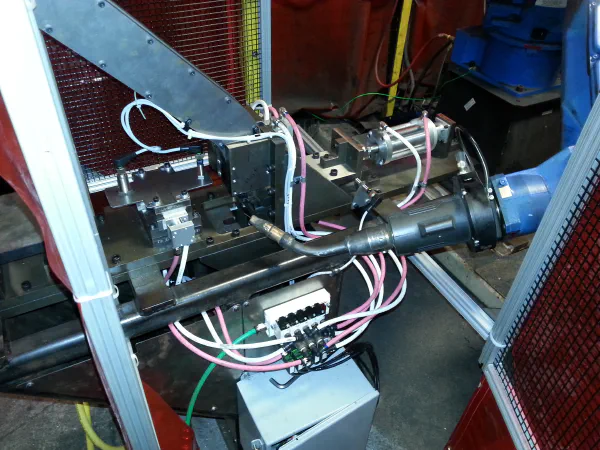
 1 Fixture Plans Overview.png
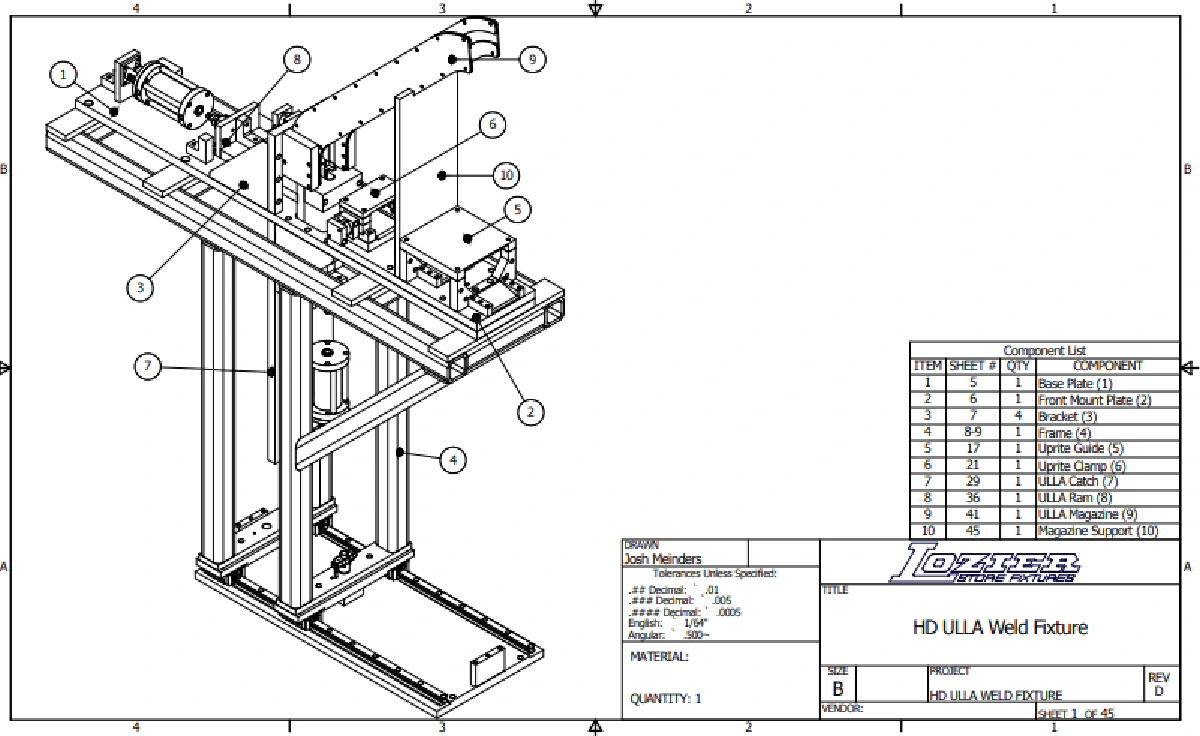
1 Fixture Plans Overview.png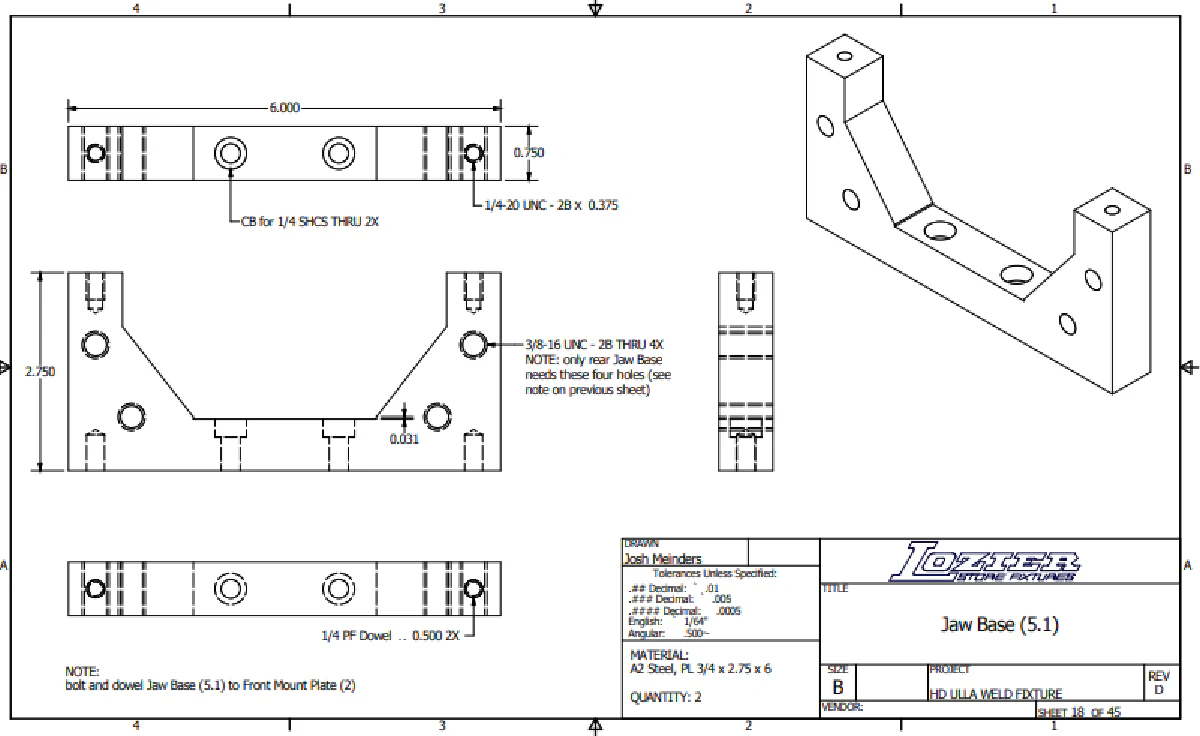 2 Fixture Plan Detail.png
2 Fixture Plan Detail.png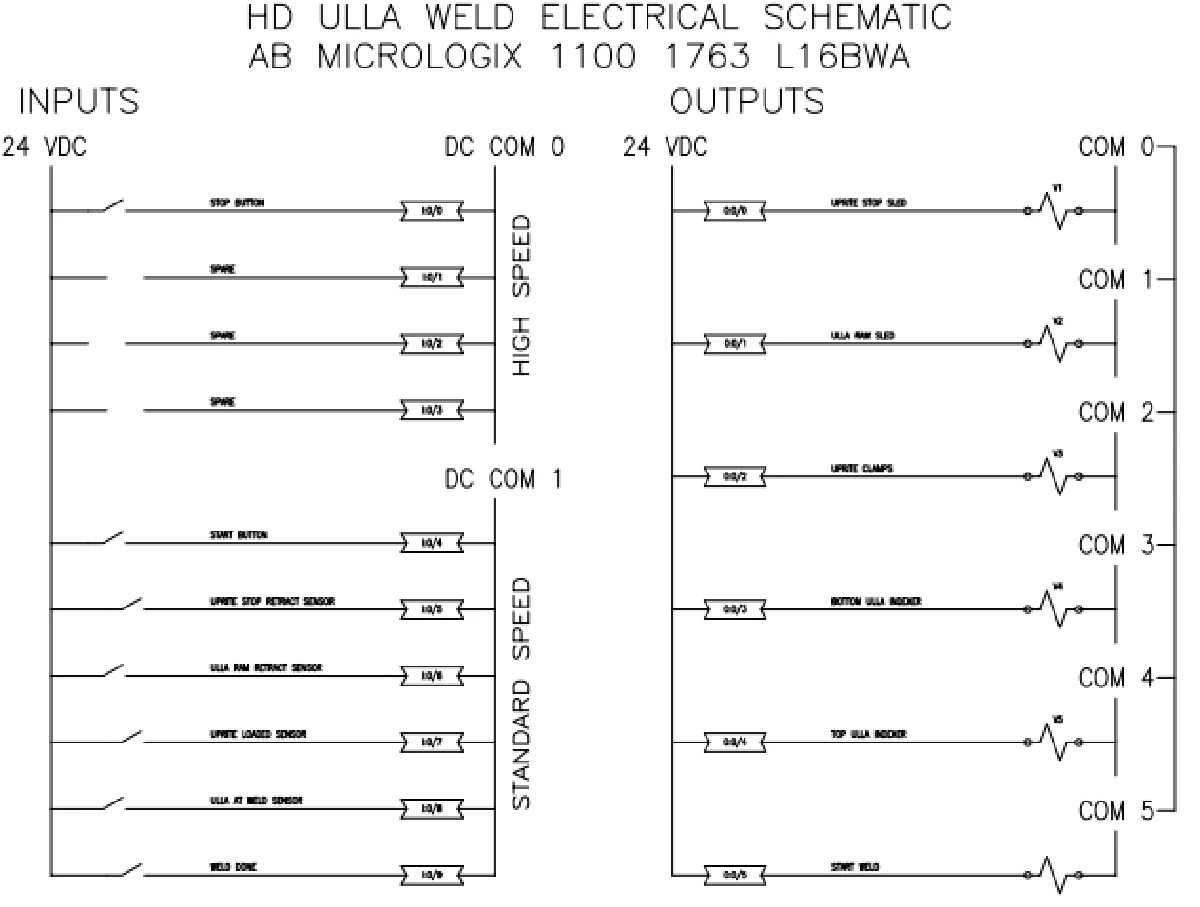 3 Plc Programming.png
3 Plc Programming.png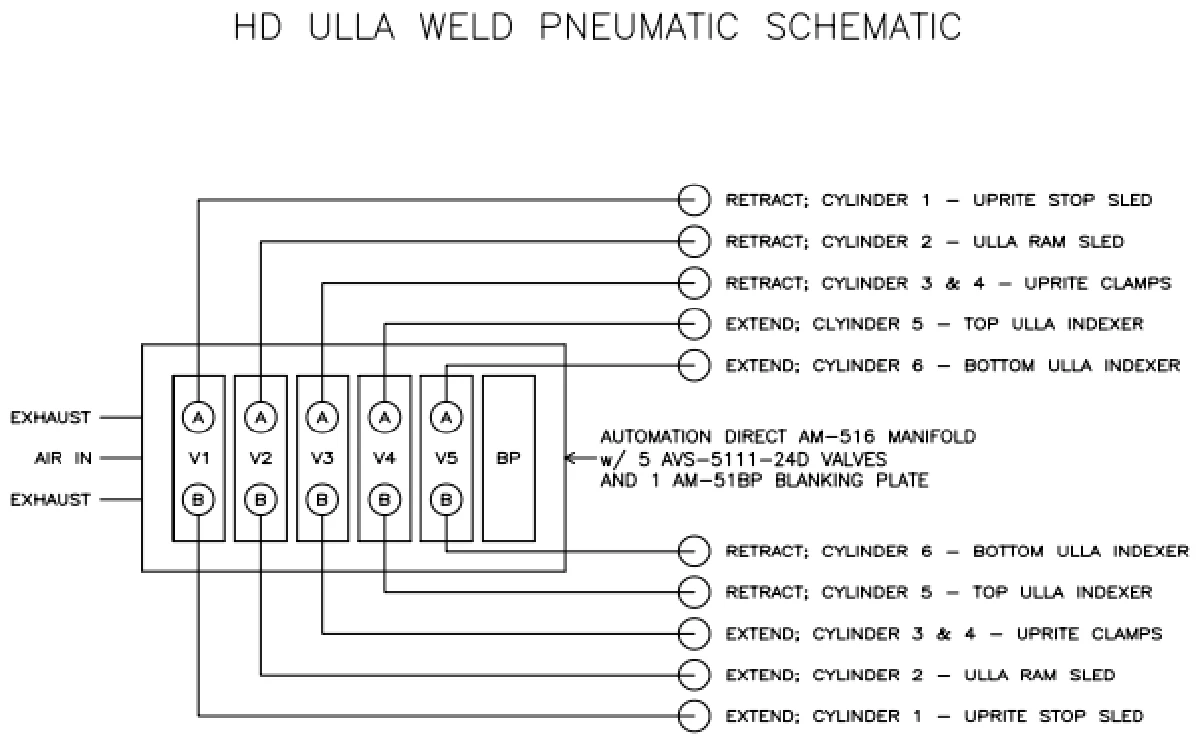 4 Pneumatic Diagram.png
4 Pneumatic Diagram.png
Situation
- Problem: Manual clamping and welding processes were labor-intensive and physically demanding.
- Goal: Automate the part-holding process to improve throughput and workplace safety.
- Context: Operators were reporting frequent back injuries due to repetitive, awkward posturing during manual welding.
Task
- Responsibility: Lead designer for the mechanical fixture and the control logic.
- Constraints: Must integrate seamlessly with existing robot arms and fit within the current cell footprint.
- Tech Stack: CAD software for modeling, PLC for sequencing, and pneumatic actuators.
Action
- Design: Developed a custom pneumatically actuated clamping fixture using CAD to ensure precision alignment.
- Programming: Wrote PLC logic to synchronize sensors, actuators, and robot arm movements for a seamless handshaking sequence.
- Prototyping: Collaborated closely with the tool and die shop to fabricate the hardware.
- Iterating: Conducted stress testing and refined the clamping pressure and sensor positioning to eliminate part slippage.
Result
- Efficiency: Halved labor costs by transitioning from manual to automated operation.
- Safety: Significantly improved ergonomics, resulting in a measurable reduction in reported back injuries.